GOMOS:in datan prosessoinnissa käytetään myös monia tilastollisia menetelmiä. Tässä on esitelty prosessoinnin vaiheita, joissa niitä hyödynnetään.
Kohina
GOMOS:in mittausta häiritsevät erilaiset tekijät, kuten instrumentin itsensä aiheuttama ns. musta virta. Kaikkia näitä häiriötekijöitä kutsutaan kohinaksi. Kohinaa on kaikki se, joka ei ole haluttua signaalia. Mitä enemmän fotoneja saapuu detektorille, sitä enemmän on kohinaakin. Kohina aiheuttaa vääristymää mittaustuloksiin ja sen takia se pitäisi osata erotella saadusta signaalista. Kohinan aiheuttama virhe huomioidaan jo datan prosessoinnin aikaisessa vaiheessa instrumenttikorjauksissa (ks. kaavio). Myös auringon valo häiritsee mittausta, mutta sitä ei kutsuta kohinaksi. Auringon valon vaikutus huomioidaan taustasignaalin erotteluvaiheessa.
Kohina on Poisson-jakautunutta, mutta sitä approksimoidaan normaalijakaumalla.
Poisson-jakauma
Olkoon satunnaismuuttuja X binomijakautunut parametrein (n,p).
(binomitodennäköisyys:
suoritetaan toistokoe, jossa toistot ovat riippumattomia toisistaan.
n=toistojen lukumäärä, p=tapahtuman A
todennäköisyys yhdellä toistolla ja todennäköisyys,
että A tapahtuu n toistossa
k kertaa on
![]() ).
).
Jos
binomijakaumassa n:n (toistojen) annetaan kasvaa rajatta
siten, että np =
![]() pysyy vakiona,
lähenevät pistetodennäköisyydet raja-arvoa:
pysyy vakiona,
lähenevät pistetodennäköisyydet raja-arvoa:
![]() ,
(k = 0, 1, 2, ...)
,
(k = 0, 1, 2, ...)
Nämä
rajatodennäköisyydet muodostavat diskreetin jakauman, ns.
Poisson-jakauman, X ~ Poisson(![]() )
)
Poisson-jakauma on diskreetti jakauma, jonka pistetodennäköisyys satunnaismuuttujalle X on
![]() (k=0,1,2,,...) ja odotusarvo E(X)=
(k=0,1,2,,...) ja odotusarvo E(X)=
![]() = np.
= np.
(Laininen 1985)
Poisson-jakauma sopii harvinaisen tapahtuman esiintymiskertojen lukumäärän jakaumaksi suuressa populaatiossa.
Pienimmän neliösumman suoran sovitus
Kun erilaisia matemaattisia malleja (kuten Beerin laki) eri ilmiöiden tarkasteluun kehitetään, käytetään monia tilastollisia menetelmiä. Eräs näistä tilastollisista menetelmistä on pienimmän neliösumman suoran sovittaminen.
|
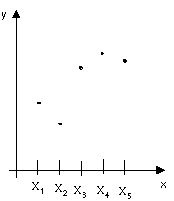
Esim: Meillä on joukko mittaustuloksia y (y=y1, y2, ...y5 ). Tunnemme muuttujan x (x=x1, x2, ...x5) ja tiedämme x:n ja y:n riippuvuudeksi seuraavan: y=ax+b. Haluamme selvittää a:n ja b:n. Merkitään mittauspisteet (5 kpl) koordinaatistoon: |
|
|
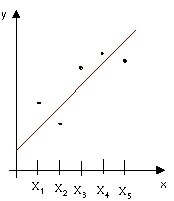
Havaitsemme, että muuttujien x ja y välillä vallitsee positiivinen korrelaatio. Pisteparveen on mahdollista sovittaa suora, jota voidaan käyttää lineaarisena ennustemallina eli ns. regressiosuorana. |
|
|
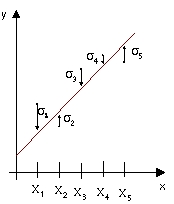
Merkitään
havaintoarvojen ja ennusteiden välisiä eroja
(jäännöksiä)
Ennustesuora
sovitetaan yleensä siten, että jäännöksien
|
|
Pienimmän neliösumman suoralle y = bx+a voidaan laskea kulmakerroin b ja vakiotermi a seuraavilla kaavoilla:
 ja
ja
![]() .
.
Virhearviointia
Mittaustuloksiin täytyy aina suhtautua kriittisesti. Virhearviointi on erittäin tärkeä osa mitä tahansa mittaamisia. GOMOS:in mittaustuloksista lasketaan esimerkiksi keskiarvoja keskihajontoja. Spektraali-inversiossa laskettuja viivatiheyksiä verrataan toisiin mittauksiin, samoin vertikaali-inversiossa saatuja tiheyksiä verrataan toisiinsa ja muihin aikaisemmin saatuihin tiheyksiin.
Esim: Tarkastellaan otsonin määrää korkeudella 30 km. Erään tähden mittauksesta on saatu määräksi X1, toisen tähden mittauksella X2 ja mittauksia on yhteensä n kappaletta.
a)
Saaduista mittaustuloksista lasketaan keskiarvo seuraavalla tavalla:
![]() .
Eli lisätään saadut arvot yhteen ja jaetaan
havaintoarvojen lukumäärällä. Alaindeksi mean
on englantia ja tarkoittaa suomeksi keskiarvoa.
.
Eli lisätään saadut arvot yhteen ja jaetaan
havaintoarvojen lukumäärällä. Alaindeksi mean
on englantia ja tarkoittaa suomeksi keskiarvoa.
b)
Mittaustulosten keskihajonta lasketaan seuraavalla tavalla:
![]() .
Eli lasketaan jokaisen havaintoarvon poikkeama keskiarvosta ja
korotetaan se toiseen, sen jälkeen lisätään
yhteen saadut neliöt ja jaetaan havaintoarvojen lukumäärällä.
Saatu välitulos, eli keskihajonnan neliö on varianssi.
Lopuksi otetaan vielä koko lausekkeesta neliöjuuri.
Alaindeksi std tulee
englannin kielen sanoista strandard deviation, joka tarkoittaa
keskihajontaa.
.
Eli lasketaan jokaisen havaintoarvon poikkeama keskiarvosta ja
korotetaan se toiseen, sen jälkeen lisätään
yhteen saadut neliöt ja jaetaan havaintoarvojen lukumäärällä.
Saatu välitulos, eli keskihajonnan neliö on varianssi.
Lopuksi otetaan vielä koko lausekkeesta neliöjuuri.
Alaindeksi std tulee
englannin kielen sanoista strandard deviation, joka tarkoittaa
keskihajontaa.
c) Jos halutaan laskea perusjoukon keskiarvo sopivan otoksen avulla, paras approksimaatio saadaan ottamalla kertoimen 1/n sijaan käyttöön kerroin 1/(n-1):
![]()